Mana yang lebih baik penggerak empat roda, depan atau belakang?
kadar
Penggerak di dalam mobil adalah transfer torsi dari mesin ke roda mana pun, yang kemudian menjadi penggerak. Dengan demikian, semua kendaraan mulai memiliki karakteristik penting seperti formula roda, di mana digit pertama berarti jumlah total roda, dan yang kedua - jumlah penggerak.

Tetapi konsep ini tidak mencerminkan properti penting lainnya dari sasis mobil, yang as rodanya memimpin dengan penggerak paruh waktu, belakang atau depan? Meskipun untuk mobil all wheel drive 4×4 atau bahkan 6×6 hal ini tidak menjadi masalah.
Apa itu penggerak empat roda, perbedaan dari belakang dan depan
Masing-masing jenis memiliki kelebihan dan kekurangannya masing-masing, sehingga tetap eksis secara relatif seimbang. Dari sudut pandang teoretis, mobil penggerak roda depan atau belakang diperoleh dari mobil penggerak semua roda hanya dengan menghilangkan bagian transmisi yang mentransmisikan traksi ke satu roda atau lainnya. Faktanya, teknologi tidak begitu mudah untuk dicapai.
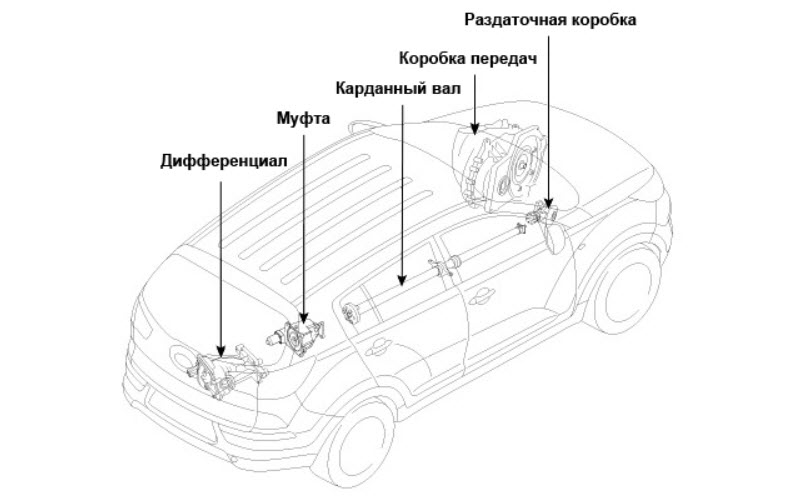
Unit wajib kendaraan penggerak semua roda adalah kotak transfer atau kotak transfer, yang mendistribusikan torsi di sepanjang gandar.
Dalam mobil mono-drive, itu tidak diperlukan, tetapi tidak dapat dikecualikan, transfer case diintegrasikan ke dalam skema umum unit daya, sehingga seluruh mobil dapat diatur ulang.
Seperti dalam kasus sebaliknya, jika modifikasi penggerak semua roda ditambahkan ke garis awalnya, misalnya, mobil penggerak roda depan dengan model yang sama, ini akan menimbulkan komplikasi besar.
Banyak pabrikan bahkan tidak mencoba menambahkan versi 4 × 4 ke hatchback dan sedan mereka, membatasi diri pada peningkatan ground clearance dan body kit plastik untuk modifikasi silang.
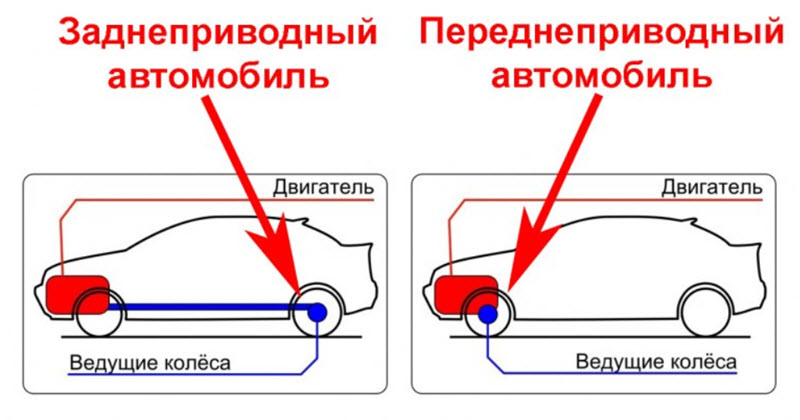
Ini juga berlaku untuk tata letak keseluruhan. Secara historis, telah berkembang bahwa pada kendaraan penggerak roda depan unit daya terletak di seberang kompartemen mesin, gearbox dilengkapi dengan dua poros dengan sambungan kecepatan konstan (sambungan CV) menuju roda depan, yang digerakkan dan dikendalikan secara bersamaan .
Untuk penggerak roda belakang, sebaliknya, motor dengan kotak terletak di sepanjang sumbu mobil, kemudian poros penggerak menuju ke gandar belakang. Penggerak empat roda dapat diimplementasikan dengan tingkat kerumitan yang berbeda dalam kedua kasus ini.
Perangkat dan prinsip operasi
Untuk mentransmisikan torsi, digunakan seperangkat komponen dan rakitan yang membentuk transmisi.
Ini termasuk:
- gearbox (gearbox), bertanggung jawab atas perubahan rasio roda gigi total, yaitu rasio kecepatan putaran poros mesin dengan kecepatan roda penggerak;
- transfer case, membagi torsi dalam rasio tertentu (tidak harus sama) antara gandar penggerak;
- roda gigi cardan dengan sambungan CV atau sambungan Hooke (persilangan) yang mentransmisikan rotasi pada jarak pada sudut yang bervariasi;
- menggerakkan gearbox gandar, selain itu mengubah kecepatan rotasi dan arah transmisi torsi;
- poros gandar yang menghubungkan gearbox dengan hub roda.

Seperti yang telah disebutkan, dua yang utama, karakteristik unit daya melintang dan memanjang, menonjol dari rangkaian total skema.
- Dalam kasus pertama, kotak transfer terpasang ke sisi gearbox, sementara itu juga disebut gearbox sudut. Untuk alasan tata letak, poros penggerak salah satu roda depan melewatinya, di sini momen dipindahkan ke gandar belakang oleh sepasang roda gigi dengan roda gigi hypoid, yang putarannya berubah 90 derajat dan menuju poros cardan yang berjalan di sepanjang mobil.
- Kasing kedua ditandai dengan penempatan kasing transfer pada sumbu yang sama dengan poros keluaran gearbox. Poros cardan ke roda belakang terletak secara koaksial dengan poros input kasing transfer, dan yang depan dihubungkan melalui transmisi cardan yang sama, tetapi dengan putaran 180 derajat dan pergeseran ke bawah atau ke samping.
Razdatka bisa sangat sederhana, hanya bertanggung jawab untuk percabangan momen, atau kompleks, ketika fungsi tambahan diperkenalkan untuk meningkatkan kemampuan atau pengendalian lintas negara:
- demultiplier, yaitu overdrive untuk mengalikan torsi di jalan;
- diferensial pusat yang mendistribusikan momen dalam proporsi tertentu;
- kopling gesekan elektromagnetik yang berfungsi sebagai aktuator dalam sistem kontrol otomatis kemampuan transmisi;
- power take-off shaft ke perangkat tambahan.
Gearbox gandar penggerak pada mesin 4×4 juga dapat menjadi rumit dengan adanya diferensial terkontrol atau kopling elektronik. Hingga kunci paksa dan kontrol roda terpisah dari satu gandar.
Jenis penggerak semua roda
Dalam mode mengemudi yang berbeda, sangat berguna untuk mendistribusikan ulang torsi antara roda untuk meningkatkan efisiensi di satu sisi, dan kemampuan lintas alam di sisi lain. Selain itu, semakin kompleks transmisi, semakin mahal harganya, sehingga berbagai jenis dan kelas mesin menggunakan skema penggerak yang berbeda.
Permanen
Yang paling logis adalah menggunakan penggerak semua roda selalu dan di semua kondisi jalan. Ini akan memastikan prediktabilitas reaksi dan kesiapan mesin yang konstan untuk setiap perubahan situasi. Tapi ini cukup mahal, membutuhkan biaya bahan bakar tambahan dan tidak selalu dibenarkan.
Skema klasik penggerak semua roda permanen (PPP) dalam segala kesederhanaannya digunakan pada mobil Soviet Niva yang awet muda. Mesin longitudinal, lalu sebuah kotak, kotak transfer roda gigi terhubung ke sana melalui poros cardan pendek, dari mana dua poros menuju ke gandar depan dan belakang.
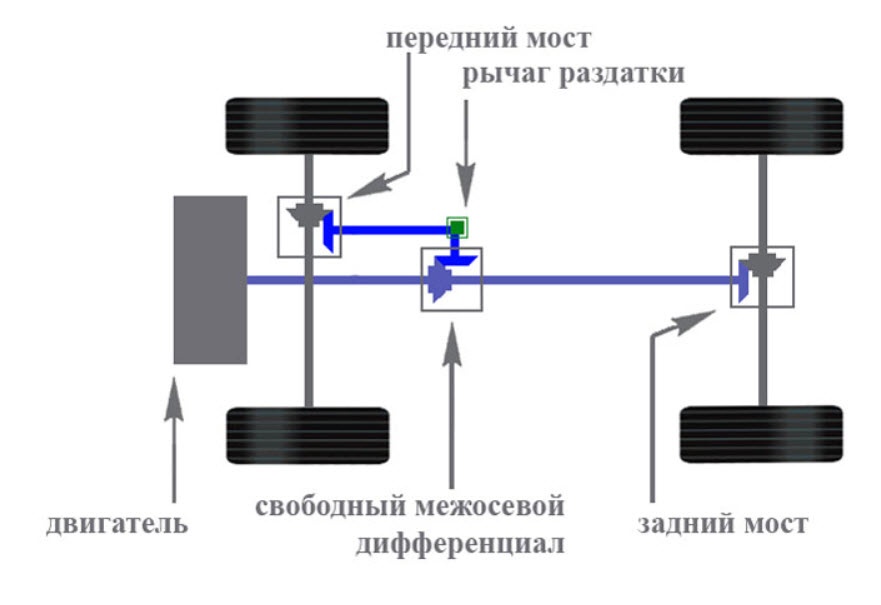
Untuk memastikan kemungkinan rotasi roda depan dan belakang pada kecepatan yang berbeda, yang penting pada perkerasan kering di tikungan, ada diferensial bebas antar gandar dalam kotak transfer, yang dapat diblokir agar setidaknya dua roda penggerak terlepas. -jalan ketika dua lainnya tergelincir.
Ada juga demultiplier yang kira-kira menggandakan daya dorong dengan pengurangan kecepatan yang sama, yang sangat membantu mesin yang relatif lemah.
Selalu ada torsi pada roda penggerak sampai salah satunya berhenti. Inilah keunggulan utama dari jenis transmisi ini. Tidak perlu memikirkan mobilisasinya secara manual atau membuat otomatisasi yang rumit.
Secara alami, penggunaan PPP tidak terbatas pada satu Niva. Ini digunakan pada banyak mobil premium mahal. Di mana harga masalah tidak terlalu penting.
Pada saat yang sama, transmisi disuplai dengan banyak layanan elektronik tambahan, terutama untuk meningkatkan kemampuan kontrol dengan daya berlebih, skema memungkinkan ini.

Автоматический
Menghubungkan poros penggerak tambahan dengan otomatisasi memiliki banyak versi, dua skema spesifik dapat dibedakan, digunakan pada BMW dan banyak premium lainnya, dan kopling di penggerak roda belakang khas untuk crossover massal.
Dalam kasus pertama, semuanya ditugaskan ke cengkeraman di razdatka dengan drive elektronik. Menjepit atau melarutkan kopling ini bekerja dalam oli, dimungkinkan untuk mengubah distribusi momen di sepanjang sumbu pada rentang yang luas.
Biasanya, ketika memulai dengan mesin yang kuat, ketika roda belakang penggerak utama mulai tergelincir, roda depan terhubung untuk membantu mereka. Ada algoritma redistribusi lainnya, mereka tertanam dalam memori unit kontrol yang membaca pembacaan berbagai sensor.
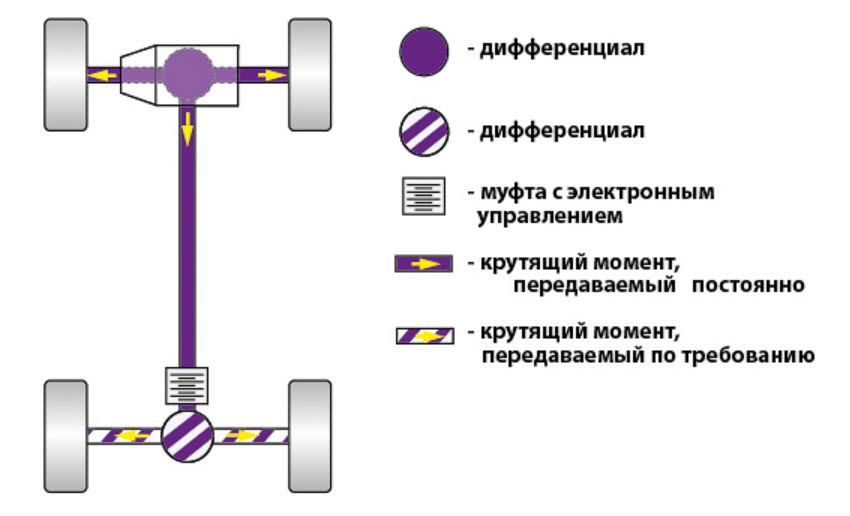
Kasing kedua serupa, tetapi roda utama berada di depan, dan roda belakang terhubung untuk waktu yang singkat melalui sambungan antara poros cardan dan gearbox gandar.
Kopling cepat panas, tetapi diperkirakan tidak akan bekerja untuk waktu yang lama, hanya kadang-kadang Anda perlu sedikit mendorong mobil melewati poros belakang di jalan yang licin atau di tikungan yang sulit. Beginilah hampir semua crossover dalam modifikasi 4×4 dibangun.
Dipaksa
Jenis penggerak semua roda yang paling sederhana dan termurah, digunakan pada SUV utilitas yang tempat kerja permanennya berada di luar trotoar. Gandar belakang berfungsi sebagai poros penggerak konstan, dan jika perlu, pengemudi dapat menghidupkan gandar depan, keras, tanpa diferensial.
Oleh karena itu, pada permukaan yang keras, mobil harus berpenggerak roda belakang, jika tidak maka transmisi akan rusak. Tetapi mesin seperti itu memiliki margin keamanan yang besar, sederhana dan murah untuk diperbaiki.
Banyak pickup dan SUV impor memiliki modifikasi seperti itu, terkadang mahal dan rumit dalam versi penggerak opsional yang lebih canggih.
Pro dan kontra dari 4WD (4×4)
Minus, pada kenyataannya, satu - harga masalah ini. Tapi itu muncul di mana-mana:
- awalnya mobil lebih sulit, oleh karena itu mahal saat membeli;
- lebih sering membutuhkan perbaikan, semakin banyak peralatan, semakin rendah keandalannya;
- karena bagian yang berputar tambahan, konsumsi bahan bakar yang lebih tinggi;
- peningkatan berat badan, yang mempengaruhi dinamika dan efisiensi;
- meningkatnya kompleksitas dalam tata letak unit, yang tercermin dalam kompleksitas pemeliharaan.
Segala sesuatu yang lain adalah jasa:
- kemampuan lintas negara yang sempurna, semua roda dimuat dengan torsi;
- mesin lebih terkontrol karena vektor dorong tambahan pada poros yang dikendalikan;
- peningkatan dinamika di jalan licin, ban lebih jarang tergelincir;
- redistribusi daya dorong mengurangi persyaratan kekuatan suku cadang;
- karet tapak ban lebih merata.
Semua ini memungkinkan untuk menggunakan all-wheel drive secara luas pada mesin yang kuat dan mahal, di mana penambahan harganya tidak begitu signifikan.
Cara mengemudikan mobil berpenggerak empat roda
Untuk mewujudkan semua kemungkinan penggerak semua roda, perlu mempelajari fitur desain mobil tertentu, untuk memahami cara kerja skema transmisi.
- Jangan gunakan all-wheel drive plug-in tanpa diferensial interaxle di aspal, ini akan mengakibatkan keausan yang cepat.
- Untuk berlatih mengemudi di jalan licin di tikungan, seringkali mobil all-wheel drive, terutama yang memiliki diferensial bebas atau transfer torsi otomatis, dapat berperilaku tidak terduga, mengubah perilaku dari penggerak roda depan ke penggerak roda belakang dan sebaliknya. Dan perlu untuk bekerja dengan pedal gas secara bergantian dengan taktik yang berlawanan secara diametris, mobil untuk menambah traksi dapat pergi dengan selip di dalam belokan, atau mulai menggeser as roda depan keluar. Hal yang sama berlaku untuk redaman selip gandar belakang yang telah dimulai.
- Stabilitas yang baik dari 4x4 di musim dingin bisa hilang tiba-tiba bagi pengemudi. Anda harus siap untuk ini, karena mobil mono-drive selalu memperingatkan kehilangan traksi terlebih dahulu.
- Kemampuan lintas alam yang luar biasa seharusnya tidak mengarah pada kunjungan tanpa berpikir ke "penyergapan" lumpur atau ladang salju. Kemampuan untuk keluar dari kondisi seperti itu tanpa traktor lebih bergantung pada ban yang dipilih daripada kemampuan otomatisasi dalam transmisi.
Pada saat yang sama, dalam strategi mengemudi yang masuk akal, mobil penggerak semua roda akan selalu membantu menghindari masalah yang akan dialami monodrive jauh lebih awal. Hanya saja, jangan menggunakannya secara berlebihan.

Di masa depan, semua mobil akan menerima penggerak semua roda. Hal ini disebabkan oleh kemajuan teknologi kendaraan listrik. Sangat mudah untuk menerapkan skema dengan motor listrik untuk setiap roda dan elektronika daya canggih.
Mobil-mobil ini tidak lagi membutuhkan pengetahuan teknik tentang jenis penggeraknya. Pengemudi hanya perlu mengendalikan pedal akselerator, mobil akan melakukan sisanya.